技術資料
動画像を用いたトンネル基本照明の不点検知の自動化
国内営業本部 営業技術部 照明研究課
キーワード
写真測光,トンネル基本照明,路面輝度測定,不点検知,動画
「路面輝度測定システム eLscope(エルスコープ)」のご案内
道路やトンネルの撮影画像から平均路面輝度などの取得、ランプの不点検知を行うソフトウェア「路面輝度測定システム eLscope(エルスコープ)」の詳細は以下よりご覧いただけます。
- 路面輝度測定システム eLscope(エルスコープ)
1.はじめに
道路照明設備は,安全で円滑な視環境を維持するために定期的に点検することが求められている1)。下記の4つが代表的な点検項目である。
- 点灯状況
- 灯具の状態
- ポールおよび基礎の状態
- 配線および配電機器の状態
点灯状況については,「点灯を要する場合の不点灯,点灯を要しない場合の点灯」を点検するよう求められている。この点灯を要する場合の不点灯(以下,単に不点と記す)の確認は,照明器具が設置されている道路やトンネルなどの区間を車両で走行し目視により行われる。そのため対象区間が長大な場合や,灯具の取り付け間隔が短い場合は,不点の確認や不点場所の特定は,非常に手間がかかる。灯具自体に不点検出機能が備わっており,灯具の不点を出力するものもあるが,最終的には人の確認が必要となる。また,灯具ごとに不点の検出・出力の機構を追加する必要があるため費用が掛かる。
筆者らは,IWASAKIテクニカルレポート 動画による路面輝度測定の検討2)で車載カメラにより路面の動画を撮影し,PCにて解析を行い路面輝度を測定する方法について述べた。さらに,撮影動画より路面輝度を解析するソフトウェア(eLscope®)の開発を行った(3章にて概要を説明する)。
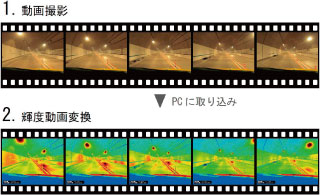
図1 動画による路面輝度測定イメージ
図1に動画による路面輝度測定のイメージを示す。
この車載カメラにより撮影された動画には,路面とともに灯具も映り込んでいる。同じ動画を用いて灯具の不点検知が行えれば,路面輝度測定と同時に灯具点灯状況の点検を行うことができ,作業効率を向上させることができる。
そこで,路面を撮影した動画像から灯具の不点を検知する方法を検討したので報告する。なお,今回は,路面輝度測定と同様,車両は一定速度で走行し,灯具が一定間隔で設置されているトンネル基本照明部に対する不点検知方法について報告する。
2.静止画・動画を用いた不点検知方法
本章では,動画像を用いた不点検知処理方法について説明する。動画は,静止画の連続からなるため,最初に,静止画中の不点検知方法について説明し,次に,動画による不点検知方法について説明する。
2.1 静止画を用いた不点検知方法
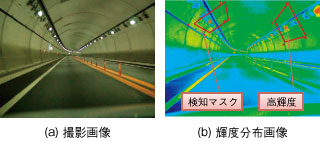
図2 路面輝度測定用画像
図2に路面輝度測定用の画像を示す。図は,動画から抽出した静止画の一例で,(a)は撮影画像,(b)は輝度分布画像を示す。不点検知処理を行うには,(b)に赤線で示すように画像中の灯具が存在する範囲(以降,検知マスクと記す)を指定する必要がある。この検知マスク内の輝度分布を確認し,高輝度が存在する場合,「正常点灯」,存在しない場合,「不点」と判断する。動画中の各静止画に対して,上記判定を行うことで,動画撮影区間の不点検知を行うことができる。
2.2 動画を用いた不点検知方法
図3に動画を用いた不点検知処理のフローチャートを示す。以降,フローチャートに従って,①検知区間・速度の設定,②灯具間隔の設定,③検知マスクの設定,④検知タイミングの順に説明する。
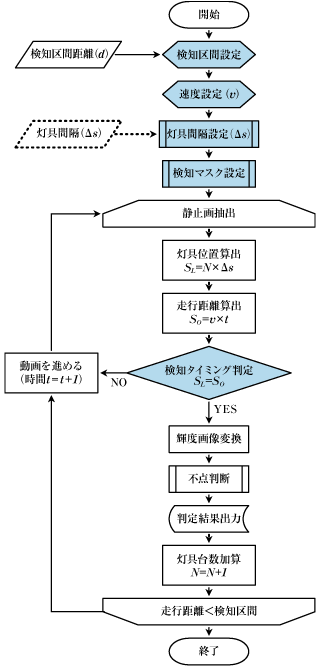
図3 不点検知動画処理フローチャート
2.2.1 検知区間の設定・平均速度の算出方法
検知区間を撮影する場合,通常,検知区間の前から撮影を開始し,検知区間通過後に撮影を停止する。そのため,撮影動画には検知区間前後に検知を必要としない部分が含まれるので,撮影動画の中から検知区間を指定する必要がある。図4に検知区間の指定イメージを示す。
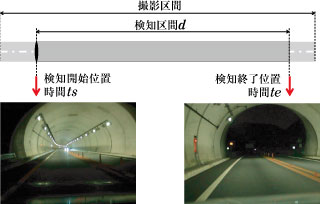
図4 撮影区間と検知区間設定
撮影動画より,検知区間の始点としてトンネル入口(図左下,時間ts),終点としてトンネル出口(図右下,時間te)をそれぞれ指定し,検知区間とする。
ここで,検知区間の距離(トンネル長)dが既知とすると,次式により車両の平均速度vを求めることができる。

2.2.2 灯具間隔の設定
灯具間隔が既知である場合は,その値を用いる。灯具間隔が未知の場合,撮影動画を用いて,以下の手順で算出する。
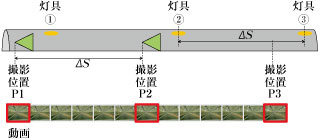
図5に撮影画像と灯具の位置関係を示す。図に示すように,灯具①から灯具③の区間を撮影した動画は,静止画の連続となる。これらの静止画の中から,灯具間隔∆sずつ進んだ撮影位置P1,P2,P3からの静止画を抽出する(図中,赤枠の画像)。
図6に,動画より抽出された撮影画像を示す。(a)は,P1からの撮影画像,(b)は,P2からの撮影画像,(c)は,P3からの撮影画像を示す。なお,図中の①から③は,灯具を示しており,(a)(b)(c)で共通している。
P1と灯具①,P2と灯具②,P3と灯具③は同じ位置関係となることから,(a)の灯具①,(b)の灯具②,(c)の灯具③は,いずれも画像右上,ほぼ同じ位置に映っている。そこで,灯具①が映った位置に灯具②が映るまでの時間∆tを求める。∆t は,動画のブレ(路面凹凸による動画のブレ)などによって誤差が生じるため,複数台の灯具に対し連続して求め,平均値を用いる。得られた∆tに車両の平均速度vを乗じて灯具間隔∆sとする。

2.2.3 検知マスクの設定方法
図7に灯具と検知マスクの関係を示す。図中,楕円は灯具,赤破線と逆三角は検知マスクを示す。また,逆三角は,青は正常点灯,オレンジは不点検知を表す。(a),(b),(c)は,それぞれ検知マスクの大きさが,狭い場合,広い場合,灯具間隔とした場合を示す。(a)に示すように検知マスクを狭くした場合,検知タイミングのわずかなずれで不点と判断されてしまう可能性がある。一方,(b)に示すように検知マスクを広くした場合,検知マスク内に対象以外の灯具が入り,対象の灯具が不点であっても「正常点灯」と判断される可能性がある。
これらを考慮し,(c)に示すように,検知マスクを灯具間隔とする。この場合,検知マスク内に2台の灯具が入ることはない。また,検知タイミングがわずかにずれても灯具を検知することができる。そのため,検知マスクは灯具間隔とするのが最適と考えられる。
図8に灯具間隔に設定した検知マスクを示す。検知マスクは左右の灯具位置にそれぞれ設定する。画像中,灯具は,左右放射状に位置している(図中,青線)。この灯具配置方向に対して,灯具間隔は垂直とし,検知マスク内に同時に2つの灯具が入らないように,左右の最も手前の灯具と次の灯具の内側を通るよう設定する(図中,緑破線)。
また,壁面や天井方向へ検知マスクが広いと,壁面に設置された非常灯や情報板の表示などの光も検知してしまう。そこで,壁面,天井方向は適切な位置で区切る。


2.2.4 検知タイミングの決定方法

図9 灯具と検知タイミングの関係
動画から順に静止画を抽出し,検知処理を行うが,処理は動画中の全ての静止画に対して行う必要はなく,灯具が検知範囲に入るタイミングで行えば良い。
図9に,灯具の検知タイミングのイメージを示す。図中,楕円は灯具,逆三角は検知マスクを示す。検知マスクは,常に車両より∆d前方にあるため,ここでは検知マスク位置を車両位置として考える(検知マスクが起点に到達した位置を,車両走行距離0とする)。
いま,起点からN番目の灯具Aが距離SLの地点に設置されている。この時,灯具Aに対する検知処理は,車両走行距離SOがSLと一致するタイミングで行う必要がある。灯具間隔∆sは,一定であるため,SLは常に,∆sの整数倍となる。そこで,SOが∆sの整数倍となるタイミングで検知処理を行う。SOは次式により算出する。

ここで,tは起点をからの経過時間,vは撮影動画より算出した平均速度を表す。しかし,常に一定速度で走行することは困難であるため,測定場所によって走行速度は異なる。
2.2.5 走行速度の変化が検知タイミングに与える影響

図10 走行速度と検知タイミングの関係
図10に,速度変化と検知マスクの範囲の関係を示す。(a)は,平均速度で走行した区間,(b)は,平均速度より早い速度で走行した区間,(c)は,平均速度より遅い速度で走行した区間を示す。図中の楕円は,灯具,逆三角は,検知マスクを表す。
(a)に示すように,平均速度で走行した区間では,検知タイミングが灯具の位置と一致する。そのため,不点を検知することができる。
一方,(b),(c)に示すように,平均速度と異なる速度で走行した区間では,徐々に検知タイミングがずれてしまい,誤検知となる可能性がある。
例として,平均速度vに対して,10%早い速度v'で走行した場合を考える。速度vで走行した場合,灯具10灯を通過するのにかかる時間をtとする。これに対して,速度v'で時間t走行すると灯具11灯を通過する。
つまり,11灯の灯具に対して10回の検知処理が行われる。そのため,図10(b)に示すように,不点を検知できない可能性がある。
同様に,平均速度vより10%遅い速度で走行した場合を考えると,灯具9灯に対して,10回の検知処理が行われる。そのため,一つの不点灯具を複数回,「不点」と検知してしまう可能性がある。
以上より,走行速度の変化が検知タイミングに与える影響は,速度変化の割合に依存することが分かる。同じ5km/hの変化でも,走行速度が,40km/hの場合と,80km/hの場合では影響が異なる。そのため,高速で走行した方が,速度変化の影響は小さくなると考えられる。
また,意図的に走行速度を遅くし,灯具数より検知回数を多くすることも考えられる。こうすることで,不点の検知数は増えるが,不点の見逃しを減らすことができると考えられる。
参考文献
- 社団法人 日本道路教会:道路照明施設設置基準・同解説,第8章 検査・第9章 維持管理,2006-10.
- 大嶋航介,山田哲司:動画による路面輝度測定の検討,IWASAKI技報,No.28, pp.2-7 (2013).
テクニカルレポートに掲載されている内容は、原稿執筆時点の情報です。ご覧の時点では内容変更や取扱い中止などが行われている可能性があるため、あらかじめご了承ください。