技術資料
写真測光による等価光幕輝度測定
- 魚眼レンズを用いた等価光幕輝度の算出方法(その1) -
営業技術部 照明研究課
キーワード
光環境評価,等価光幕輝度,グレア,魚眼レンズ,立体角,射影
3.写真測光による等価光幕輝度の算出方法
式(7)より等価光幕輝度の算出には観測点を中心とした前方半球状の広い範囲の光の情報を取得する必要がある。そのため,縦・横それぞれに画角115[deg]以上の撮影画像が必要になる。
しかし,一般的なレンズでは画角115[deg]以上を確保することは難しい。そのため,写真測光による正確な等価光幕輝度の計算には魚眼レンズ用いて広画角を確保する必要がある。
筆者らは,まず魚眼レンズの一つである等立体角射影のレンズを用いた場合の計算方法を検討した。また,本稿では,一般的なレンズを用いた等価光幕輝度の算出方法についても述べる。これは,画角による影響がわずかであれば,一般的なレンズは魚眼レンズに比べ低価格であること,減光フィルタの装着が容易であるなど利点があり,今後検討を行うことを考慮したためである。
3.1節では輝度分布L(θ,φ)[cd/m²]から等価光幕輝度を算出する方法を説明する。3.2節では鉛直角θ[rad],1画素当たりの立体角(単位立体角)Δω[sr]の計算のためにレンズの光学特性について述べる。3.3,3.4節ではその算出方法について説明する。
3.1 輝度分布からの算出
魚眼レンズを用いた写真測光により,観測点から前方の半球状の輝度分布L(θ,φ)[cd/m²]を取得することができる。得られた各画素の輝度値と各画素の鉛直角θ[rad]を用いて等価光幕輝度を算出する。
ここで式(7)の鉛直面照度En(θ,φ)[ℓx]を,各画素の輝度値L(θ,φ)[cd/m²]と単位立体角Δω(θ,φ)[sr]を用いて書き換えると式(8)のように表せる。

式(8)を輝度分布L(θ,φ)[cd/m²]に用いることで等価光幕輝度値を算出することができる。上記式をさらに写真測光で用いるため,各画素の輝度分布L(x,y)[cd/m²]を用いて書き換えると式(9)を得る。
![]()
ここで,Δω(x,y)は各画素の単位立体角[sr],θ(x,y)は各画素に入射する光の鉛直角[rad]を表す。よって,先に述べたMoon-Spencerらの定義する式(5),(6)の範囲内の画素において上記の計算を用いることで写真測光により等価光幕輝度Leq[cd/m²]を算出することができる。
しかし,Δω(x,y)[sr],θ(x,y)[rad]はいずれも画素ごとに異なる変数であり,レンズの種類や方式によって計算方法が異なる。以降に,各画素の単位立体角Δω(x,y)[sr],入射光の鉛直角θ(x,y)[rad]の算出方法について述べる。
3.2 レンズの光学特性
本節では,鉛直角θ[rad]を求めるためにレンズの光学特性について説明する。
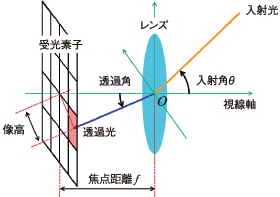
図3 入射光と像高の幾何学的関係
図3にレンズの入射光と透過光が結像する像高の関係を示す。この入射光と像高の特性(射影方式)によってレンズは,以下の5種類に分類することができる。
- 正射影
- 等立体角射影
- 等距離射影
- 立体角射影
- 透視射影
一般的なレンズには透視射影方式が採用されており,透視射影方式以外の射影方式を採用したレンズが「魚眼レンズ」とされる。以降では,今回検討を行った等立体角射影,透視射影それぞれの特性について記す。
図4に,各射影方式の入射角と透過角の関係を示す。透視射影方式では,入射角と透過角が等しくなる。これに対し,魚眼レンズは,透過角が入射角より小さくなる光学特性を有している。このため,魚眼レンズは透視射影方式に比べ広画角を確保することができる。
式(10),式(11)に各射影方式の像高yと焦点距離fと入射角θ[rad]の関係を示す。
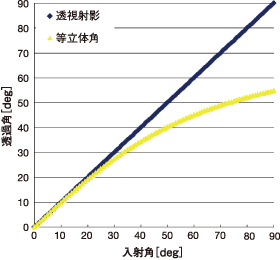
図4 入射角-透過角特性
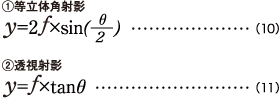
以降,上記に記した射影方式別の像高計算式をfy(f, θ)と記す。使用レンズに合わせて適切な算出式を用いることとする。
3.3 視線軸と光源のなす鉛直角θ[rad]の算出
任意の画素に結像する入射光と視線軸がなす鉛直角θ[rad]の計算方法を記す。ここでは,画素の座標は画像中心を原点とし,視線軸と画像中心が一致しているものとする。
まず鉛直角θ[rad]を求める。任意の画素(x0,y0)と視線軸との受光素子上の距離rは式(12)で表される。
ここで,Δdは撮影に用いたカメラの1画素当たりのサイズを表す。レンズはfy(f,θ)のような光学特性を有しているため,鉛直角θ[rad]はレンズの焦点距離fと視線軸との距離rから算出することができる。よって,fy(f,θ)をθ[rad]について解き,得られた式の像高yへ視線軸との距離rを代入することで求められる。すなわち,射影方式ごとの鉛直角θ[rad]の算出式は式(13),(14)のように表される。
![]()
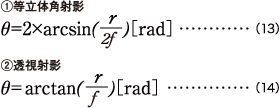
以上で,鉛直角θ[rad]が求められる。
3.4 単位立体角Δω[sr]の算出
等立体角射影方式以外のレンズでは,画素の位置によって単位立体角Δω[sr]の値は異なる。そこで,3.4節では任意座標の単位立体角Δω[sr]の算出方法について記す。
立体角は単位球から切り取る閉曲面の面積と等しい。また,単位球から切り取る閉曲面が円形か矩形かによって立体角の計算方法が異なる。
3.4.1 等立体角射影方式の場合

図5 単位球から切り取る閉曲面
図5に,視線軸上にある円形が作る閉曲面を示す。ここで,円の中心と球の中心を結ぶ直線と円は直交しているものとする。
等立体角射影方式では,単位立体角Δω[sr]は画素の位置によらず一定となる。そこで,計算の容易な円形の立体角ω[sr]を計算し,円形範囲内の総画素数N[pix]で除することで単位立体角Δω[sr]を求める。すなわち,単位立体角Δω[sr]は式(15)で求められる。
全ての水平方向に対して鉛直角θh[rad]の円が作る立体角ω[sr]は,式(16)のように表される。
![]()
![]()
ここで画角θh[rad]は任意の値をとれる。また,rは単位球の半径を表しており1を代入する。
図6に画角θh[rad]の等立体角射影レンズを用いた場合の入射角と受光素子の幾何学的関係を示す。
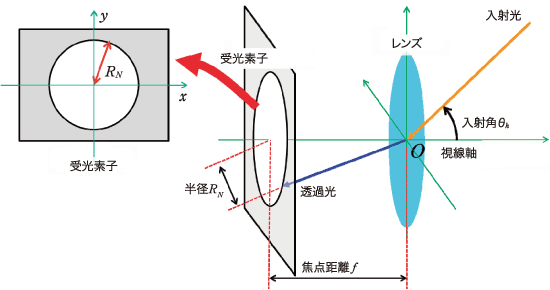
図6 全周魚眼レンズの撮影範囲と画像
RNは画像上の円の半径の画素数[pix]を表す。図中の円内の総画素数N[pix]は,式(17)で求められる。
RN[pix]は画像中心から鉛直角θh[rad]で入射する光が結像する画素までの距離を求め,受光素子1画素当たりの大きさΔdで割ることで求められる。つまり,式(18)により求められる。
![]()
![]()
以上で総画素数N[pix]を求めることができる。よって,式(16)の定積分を解き,式(15)に代入することによって等立体角射影方式の単位立体角Δω[sr]を算出する式(19)を得る。
![]()
以上の結果より,鉛直角θh[rad]と円形範囲内の総画素数N[pix]が既知になることで単位立体角Δω[sr]が求められる。
3.4.2 透視射影方式の場合
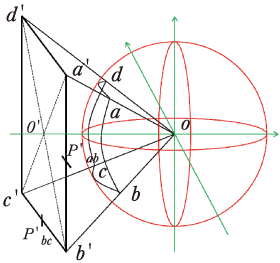
図7 閉曲面が矩形の場合の立体角
次に,透視射影方式の場合の単位立体角Δω[sr]を計算する。まず,視線軸と直交する矩形領域が作る立体角ω[sr]の算出方法を述べる。図7は,矩形領域と単位球の幾何学的関係を示す。
点oは単位球の中心,□a'b'c'd'は立体角を求めようとする矩形,曲面abcdは矩形領域が単位球表面から切り取る閉曲面(以降,球面四角形abcdとする),P'abは辺a'b'の中点,P'bcは辺b'c'の中点を表す。矩形領域が作る立体角ω[sr]は球面四角形abcdの面積に等しい。ここで,単位球の中心oと矩形領域の中心o'を結ぶ直線と矩形領域は直交しているものとする。また,以降の式では,二点の作る弧をArc(点1,点2)と表記する。
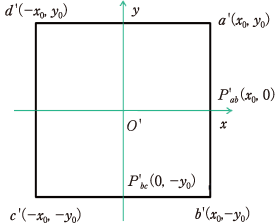
図8 矩形の座標
ここで,□a'b'c'd'を受光素子上の矩形と考えると,辺oo'は焦点距離fとなる。また,a'が画像中心を原点とした任意の画素(x0,y0)とすると,a'b'c'd'はそれぞれ,図8に示す座標になる。
まず,単位球表面の弧ab,弧bc,弧caをそれぞれ求める。点P'ab,P'bcを用いると,それぞれの弧の大きさは以下により求められる。ここで求める弧の大きさは,弧度法[rad]表記とする。また,Δdは撮影に用いたカメラの1画素当たりの大きさを表す。
弧abの計算を式(20)~式(22)に示す。
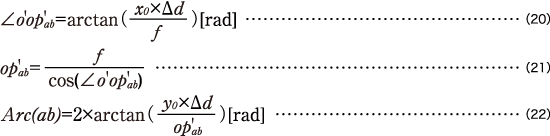
同様にして,弧bcを求める。
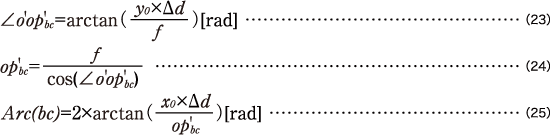
次に,弧caを以下の手順で求める。

ここで,球面四角形abcd上の二つの弧が作る球面上の角[rad]をそれぞれ下記のように表記する。
Arc(da)・Arc(ab)→∠A
Arc(ab)・Arc(bc)→∠B
Arc(bc)・Arc(cd)→∠C
Arc(cd)・Arc(da)→∠D
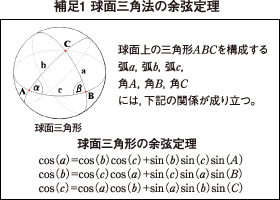
ここまでに求めたそれぞれの弧を用いて,球面三角法の余弦定理(※補足1を参照)より球面上の∠B[rad]は式(28)のように表される。
![]()
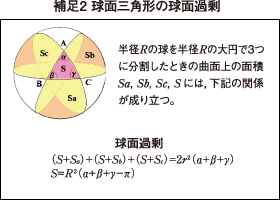
また,明らかに∠A=∠B=∠C=∠Dである。よって,球面三角形の球面過剰(※補足2を参照)より,球面四角形abcdの面積,すなわち□a'b'c'd'が作る立体角ω[sr]は,以下となる。
![]()
ここで,rは球の半径を表し,単位球であるため1とする。
以上の手順で,矩形領域が作る立体角を求めることができる。しかし,ここまでで述べた矩形領域の作る立体角の算出方法を適用できるのは,「単位球の中心と矩形領域の中心を結ぶ直線と矩形領域が直交している」場合に限られる。
次に,単位立体角Δω[sr]を計算する。透視射影方式の場合,単位立体角は,求めようとする画素の位置により異なる。そこで,画素ごとに立体角を計算する必要がある。
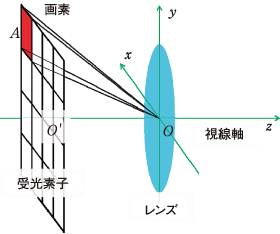
図9 受光素子とレンズの幾何学的関係
図9にカメラの受光素子・各画素とレンズの焦点との幾何学的関係を示す。ここで,oはレンズの焦点,o'は受光素子の中心を表す。oo'は,視線軸と一致しており,受光素子と視線軸は直交しているものとする。
ここで,図中の赤で示した領域部分の画素Aの中心と焦点を結ぶ直線は画素Aの矩形領域と直交しない。そのため,先に示した矩形の作る立体角の算出方法では画素Aの単位立体角を求めることができない。そこで画素Aの単位立体角を求めるため,視線軸と直交する矩形領域の組み合わせで表す必要がある。
図10は,任意の画素A(図中赤の矩形)の立体角算出のため,視線軸と直交する4つの矩形領域の組合せにした図を示す。図中a),b),c),d)に示す領域はそれぞれ,以下の4つとする。
領域B□(+x1,+y1)(-x1,+y1)(-x1,-y1)(+x1,-y1)…図a)
領域C□(+x1,+y0)(-x1,+y0)(-x1,-y0)(+x1,+y0)…図b)
領域D□(+x0,+y1)(-x0,+y1)(-x0,-y1)(+x0,-y1)…図c)
領域E□(+x0,+y0)(-x0,+y0)(-x0,-y0)(+x0,-y0)…図d)
また,図e)は4つの領域すべてを表示した図を示す。
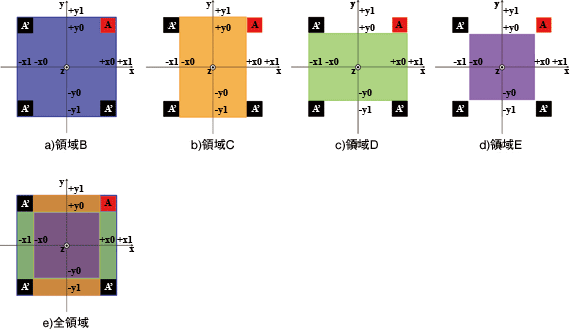
図10 視線軸を含む矩形の組み合わせ
領域B,C,D,Eはいずれも視線軸と直交する矩形である。よって,式(29)を用いて立体角を求めることができる。
まず,領域B,C,D,Eが作る立体角をそれぞれ求めSB,SC,SD,SEとする。次に,領域Bの作る立体角から領域C,領域Dの作る立体角を引く。ここで,領域Cと領域Dには重複する領域が存在する。重複して引かれた領域Eが作る立体角を足し合わせることで,領域Aおよび3つの領域A'が作る立体角S'Aが求められる。
![]()
領域Aと領域A'は等しいため,領域Aの作る単位立体角Δω[sr]は次式によって求められる。
![]()
以上の結果より,受光素子1画素の大きさΔd,焦点距離fが既知となることで透視射影方式の任意の画素の単位立体角Δω[sr]を算出できる。
4.まとめ
本テーマでは,写真測光による等価光幕輝度の算出方法について検討を行った。その結果,写真測光により得られる輝度分布から等価光幕輝度の算出が可能であることを確認した。また,透視射影方式,等立体角射影方式のレンズについて等価光幕輝度の計算に必要な,各画素の単位立体角Δω(θ,φ)[sr],視線軸からの鉛直角θ[rad]の算出方法を明らかにした。これらの算出方法を用いて写真測光により等価光幕輝度を求めるソフトウェアを開発することで,等価光幕輝度の測定が容易になると考えられる。
この記事は弊社発行「IWASAKI技報」第25号掲載記事に基づいて作成しました。
(2011年12月6日入稿)
テクニカルレポートに掲載されている内容は、原稿執筆時点の情報です。ご覧の時点では内容変更や取扱い中止などが行われている可能性があるため、あらかじめご了承ください。